
Safety with Agency: Human-Centered Safety Filter with Application to AI-Assisted Motorsports

Introspective Planning: Aligning Robots’ Uncertainty with Inherent Task Ambiguity

Who Plays First? Optimizing the Order of Play in Stackelberg Games with Many Robots
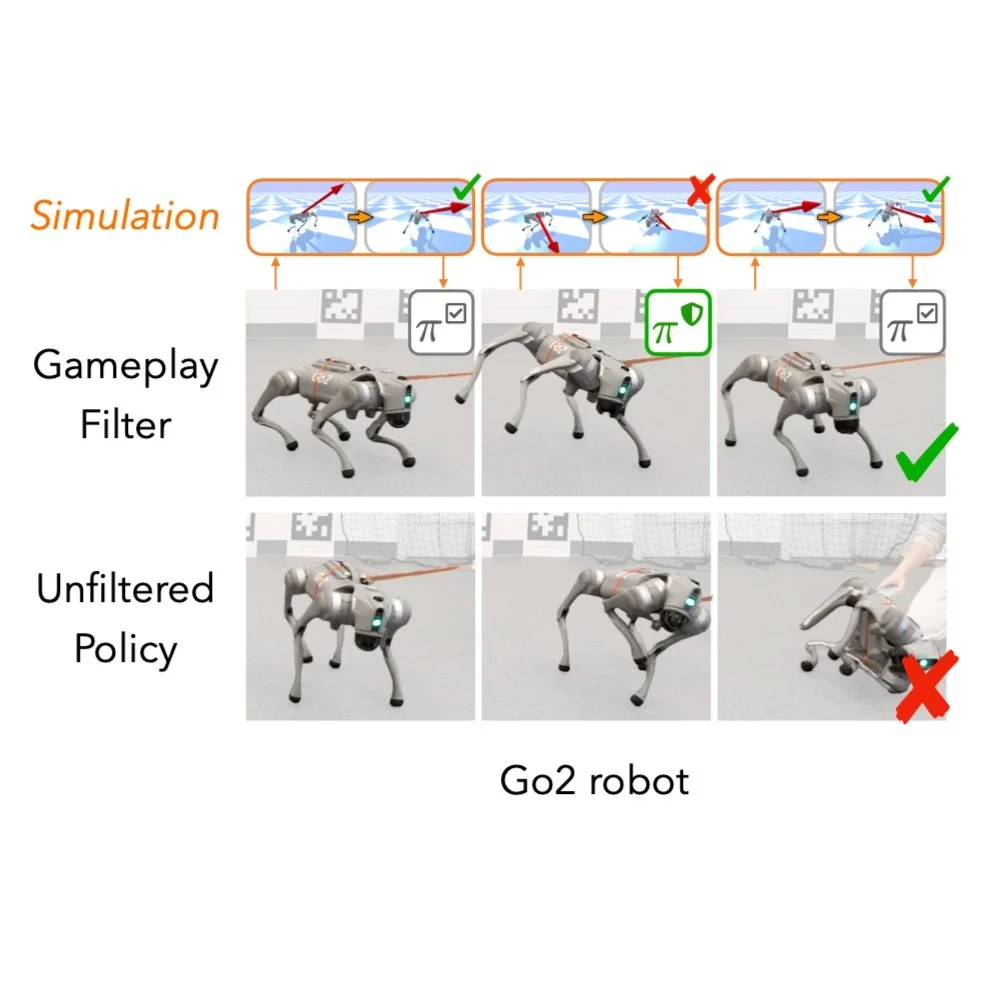
Gameplay Filters: Robust Zero-Shot Safety through Adversarial Imagination

Emergent Coordination through Game-Induced Nonlinear Opinion Dynamics

Fast, Smooth, and Safe: Implicit CBF through Reach-Avoid DDP

Active Uncertainty Reduction for Interaction Planning

Interpretable Trajectory Prediction via Counterfactual Responsibility

ISAACS: Iterative Soft Adversarial Actor Critic for Safety

Sim-to-Lab-to-Real: Safe Reinforcement Learning with Generalization Guarantees
Safety and Liveness Guarantees through Reach-Avoid Reinforcement Learning
