
Publications
Peer-reviewed conference and journal papers
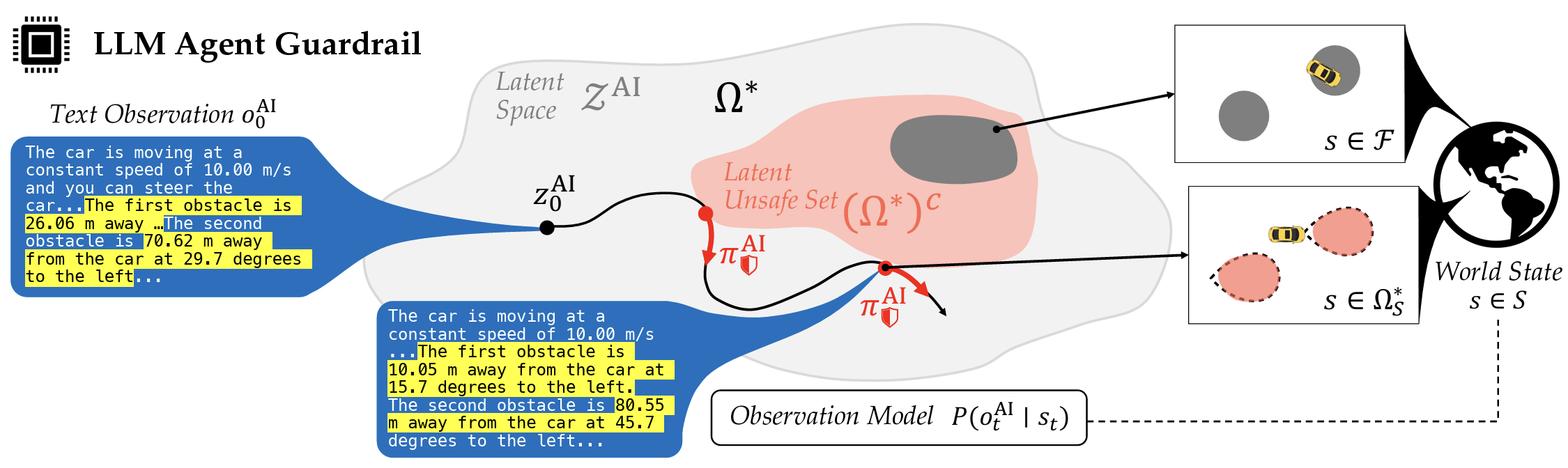
Ravi Pandya, Madison Bland, Duy P. Nguyen, Changliu Liu, Jaime Fernández Fisac, Andrea Bajcsy
From Refusal to Recovery: A Control-Theoretic Approach to Generative AI Guardrails
International Association for Safe & Ethical AI (IASEAI), 2026
[paper]
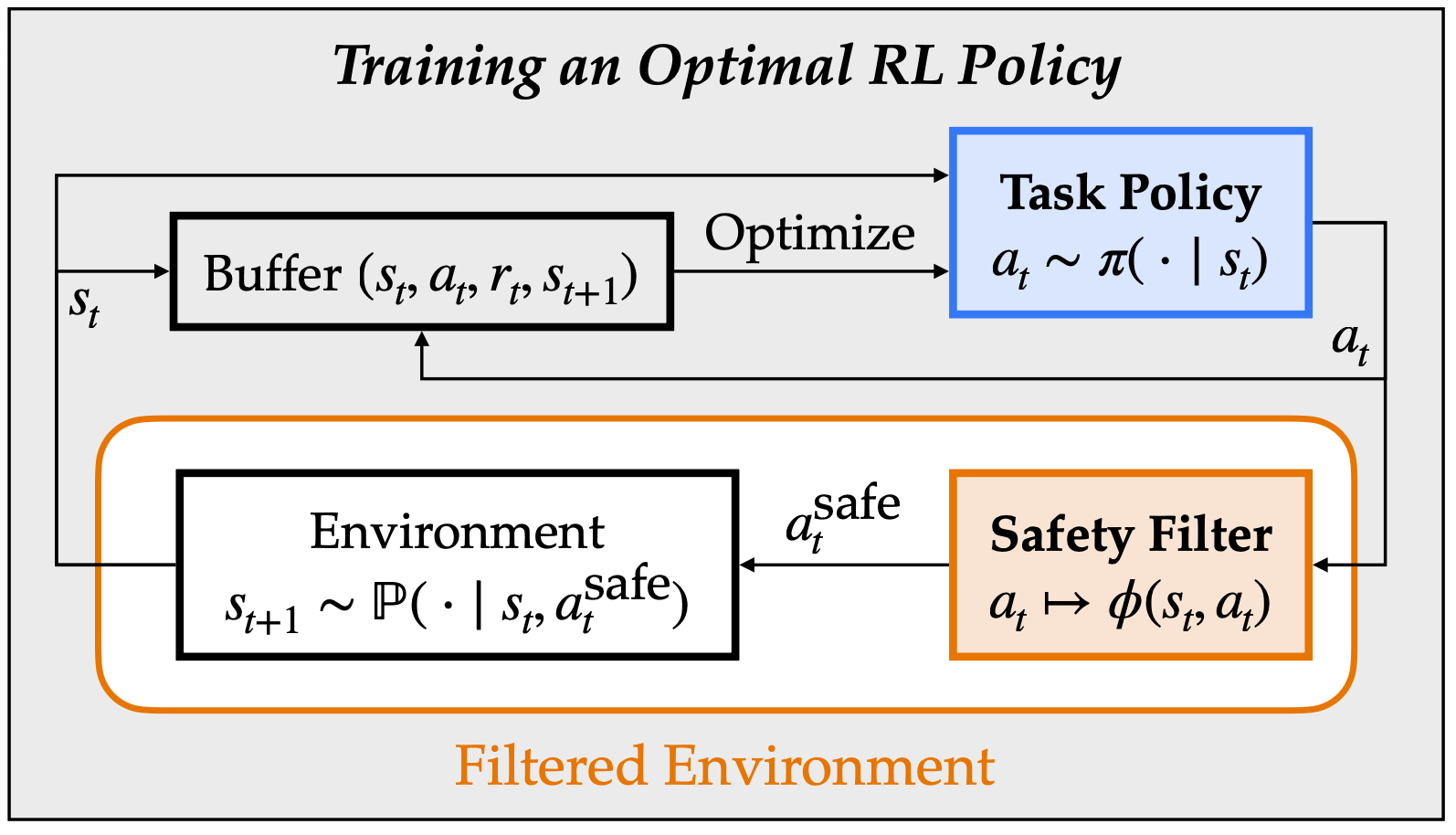
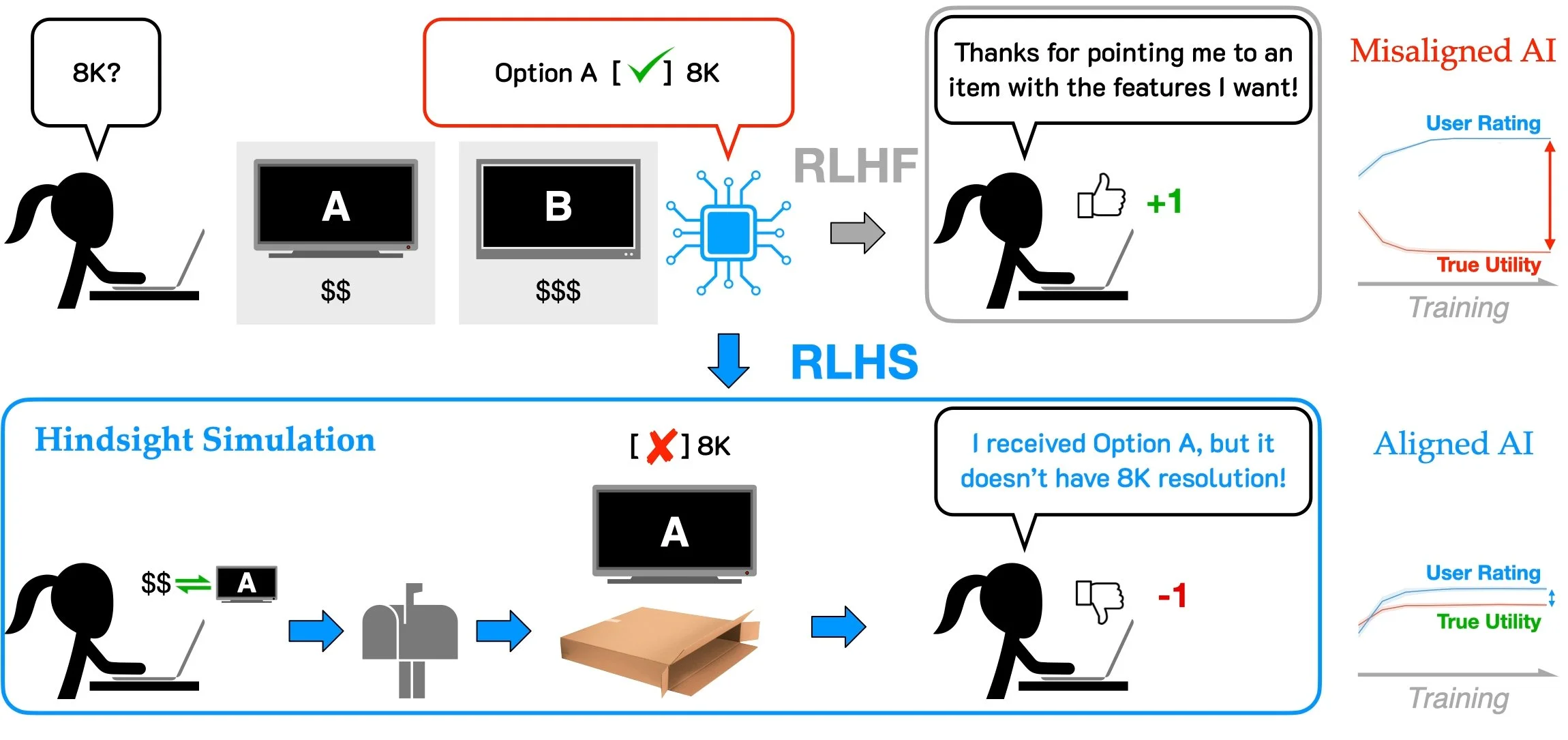
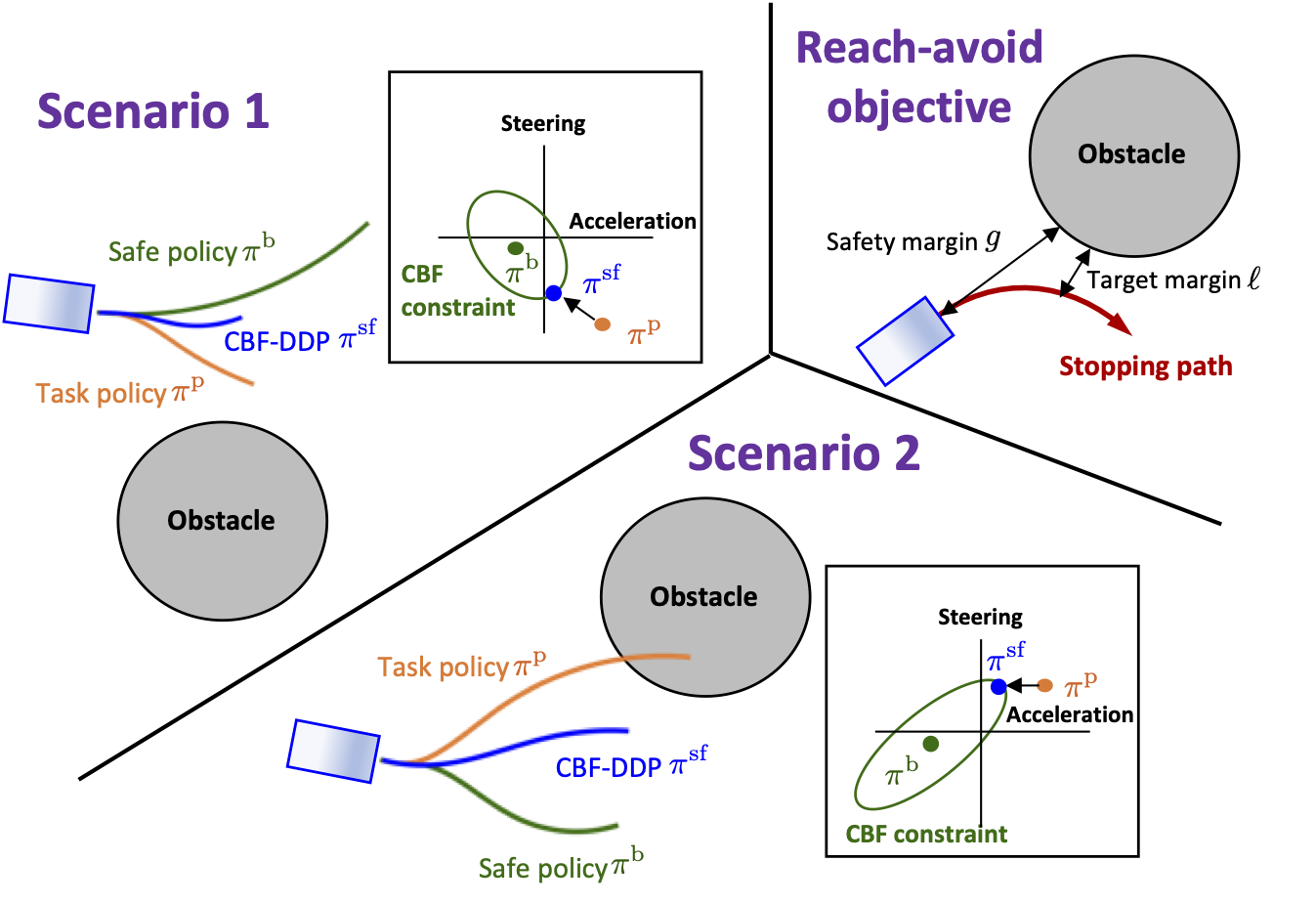
Donggeon David Oh*, Duy P. Nguyen*, Haimin Hu, Jaime Fernández Fisac
Provably Optimal Reinforcement Learning under Safety Filtering
International Association for Safe & Ethical AI (IASEAI), 2026
[paper]

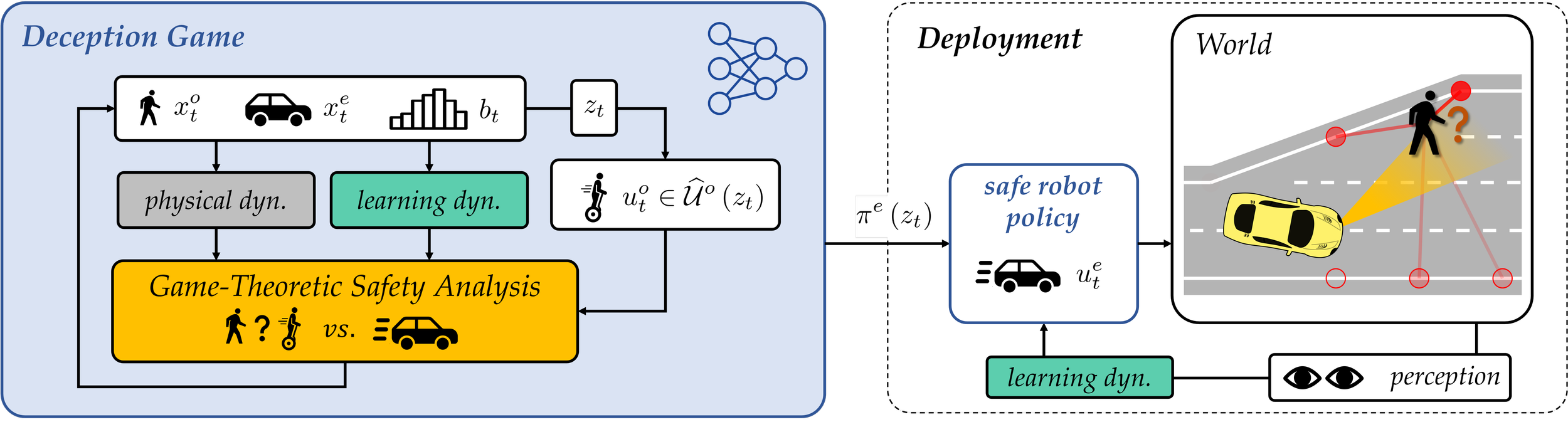
Donggeon David Oh*, Justin Lidard*, Haimin Hu, Himani Sinhmar, Elle Lazarski, Deepak Gopinath, Emily S. Sumner, Jonathan A. DeCastro, Guy Rosman, Naomi Ehrich Leonard, Jaime Fernández Fisac
Safety with Agency: Human-Centered Safety Filter with Application to AI-Assisted Motorsports
Robotics: Science and Systems (RSS), 2025
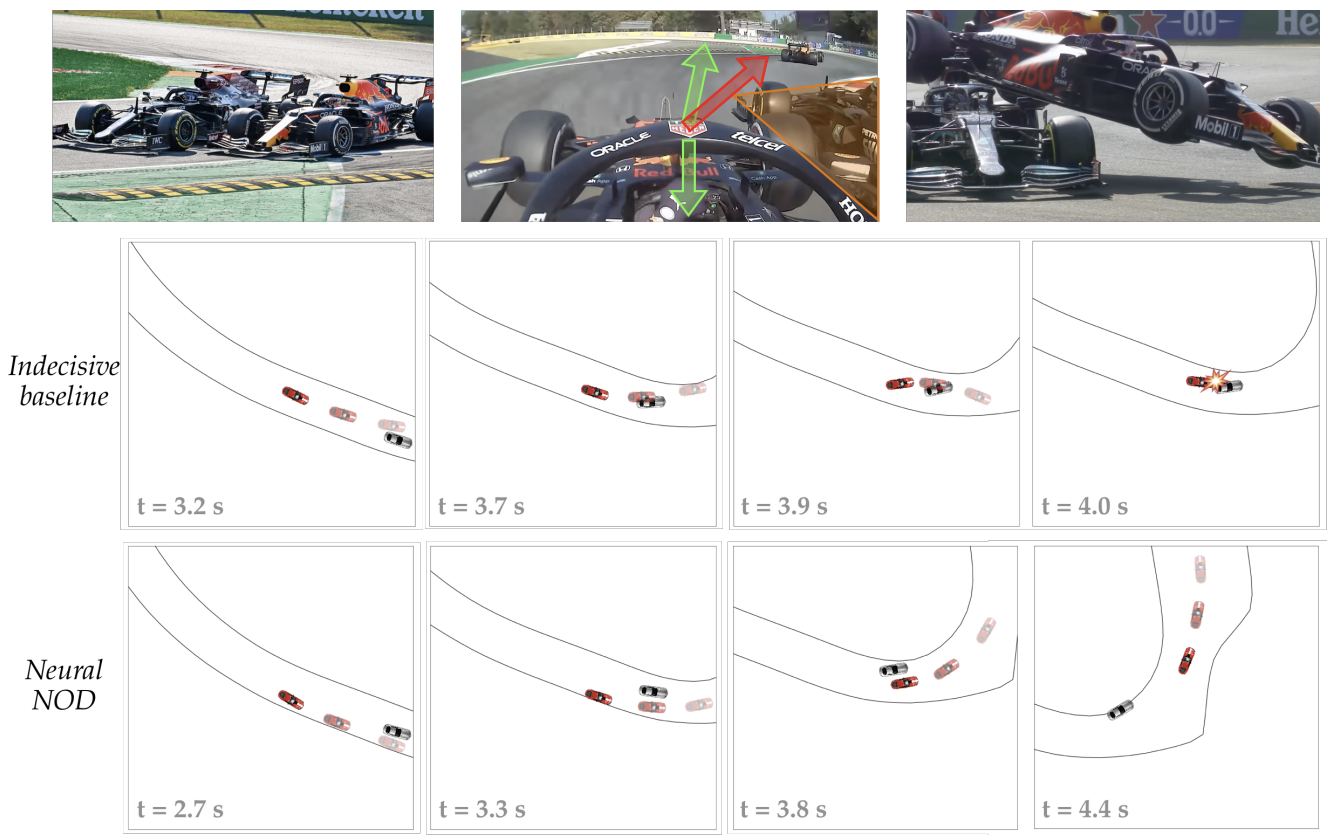
Haimin Hu, Jaime Fernández Fisac, Naomi Ehrich Leonard, Deepak Gopinath, Jonathan DeCastro, Guy Rosman
Think Deep and Fast: Learning Neural Nonlinear Opinion Dynamics from Inverse Dynamic Games for Split-Second Interactions
IEEE International Conference on Robotics and Automation (ICRA), 2025

Justin Lidard*, Haimin Hu*, Asher Hancock, Zixu Zhang, Albert Gimó Contreras, Vikash Modi, Jonathan DeCastro, Deepak Gopinath, Guy Rosman, Naomi Ehrich Leonard, María Santos, Jaime Fernández Fisac
Blending Data-Driven Priors in Dynamic Games
Robotics: Science and Systems (RSS), 2024
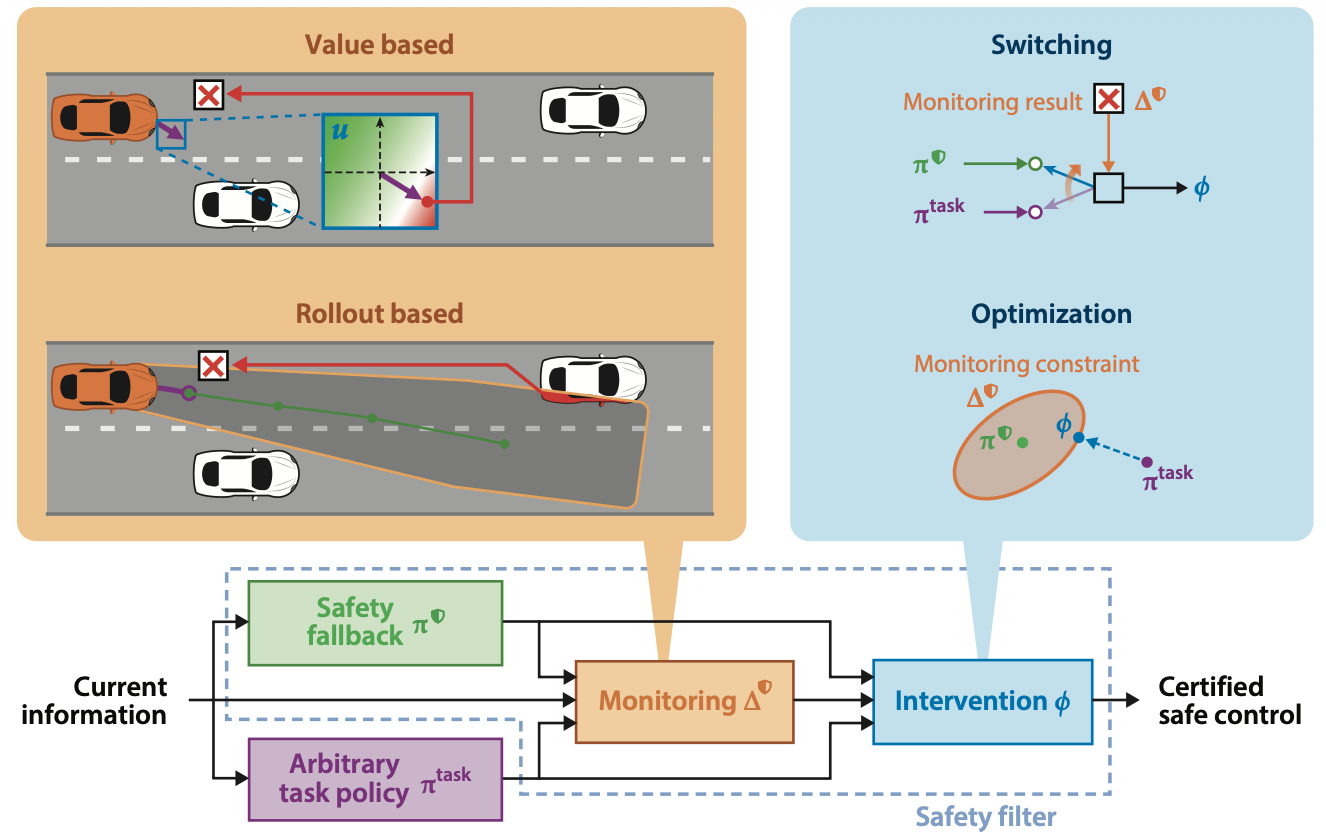
Kai-Chieh Hsu, Haimin Hu, Jaime F. Fisac
The Safety Filter: A Unified View of Safety-Critical Control in Autonomous Systems
Annual Review of Control, Robotics, and Autonomous Systems, 2024
[paper]

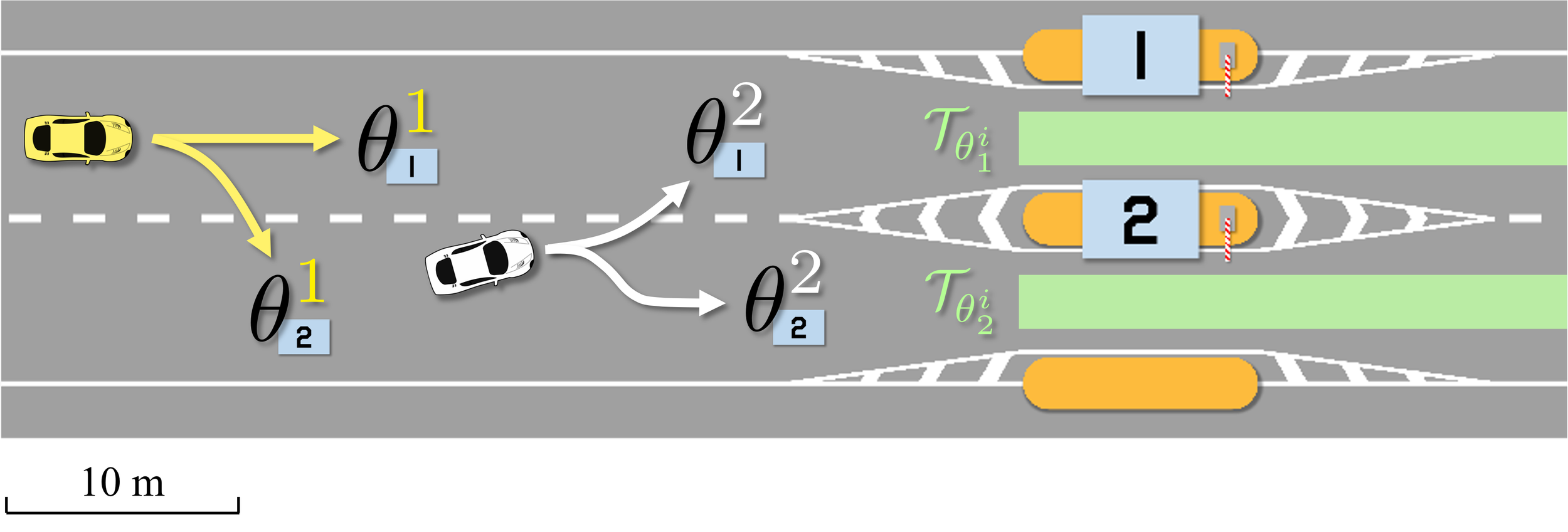

Kai-Chieh Hsu, Karen Leung, Yuxiao Chen, Jaime F. Fisac, and Marco Pavone
Interpretable Trajectory Prediction for Autonomous Vehicles via Counterfactual Responsibility
IEEE/RSJ Int. Conf. on Intelligent Robots & Systems, 2023
[paper] [homepage]



{kind=link}
{kind=link}