
The Safe Robotics Lab team
Humans and Robots working towards a safer future together.
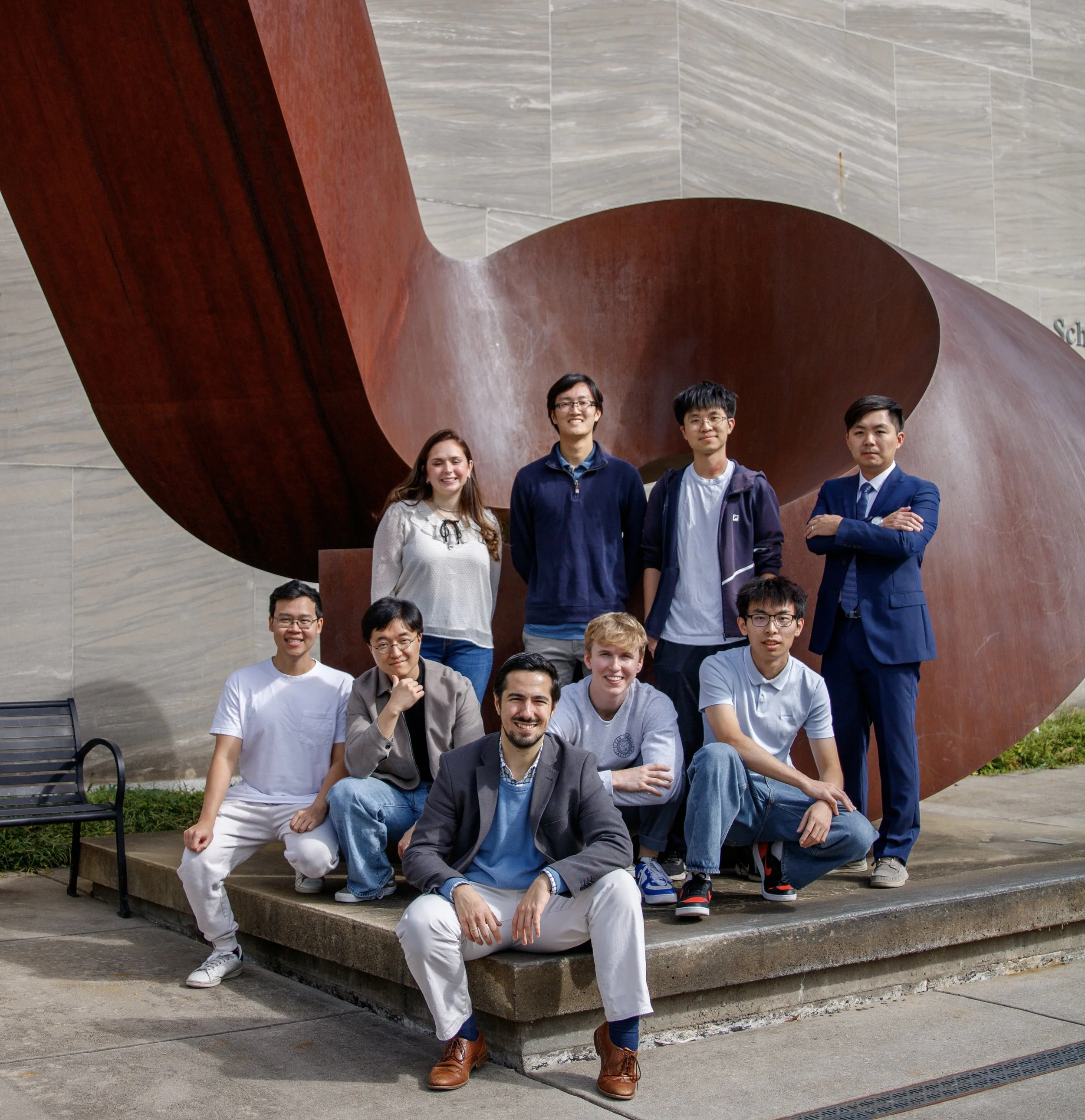









Photos by Tasneem Yusufali and Sameer A. Khan.
Principal Investigator

Photo by David Crow.
Jaime Fernández Fisac
Assistant Professor
Electrical and Computer Engineering
Princeton University
Jaime joined the Princeton faculty in August 2020, after working on safety and interaction for autonomous vehicles at Waymo.
He’s interested in the problem of making autonomous systems smart enough to function safely in a world full of people. This ranges from drones and autonomous cars entering our cities to large-scale artificial intelligence algorithms influencing what billions of us experience, think and do every day.
PhD Students
-

Duy Phuong Nguyen
Duy started his PhD at Princeton in Spring 2021. He wants to build robotic systems that can learn and adapt safely and robustly in uncertain new situations.
-

Madison Bland
Maddie started her PhD at Princeton in Fall 2022 after earning her B.S. in Electrical Engineering at The College of New Jersey. She’s interested in safe navigation of underwater robots for the purpose of environmental monitoring. She hopes to build robot systems that can make decisions under uncertainty and are robust to disturbances.
-
Kaiqu Liang
Kaiqu started his PhD at Princeton in Fall 2022. He is interested in building safe, reliable AI systems that effectively interact with and assist humans.
-
Justin Wang
Justin started his PhD at Princeton in Fall 2023, after having earned joint B.S./B.S. degrees in math and electrical engineering from the University of Maryland, College Park. He is interested in providing provable guarantees for game-theoretic reinforcement learning and algorithmic decision-making in an unsafe, uncertain, and unforgiving world.
-

Donggeon (David) Oh
David started his PhD at Princeton in Fall 2024 after completing his B.S. in Aerospace Engineering at Seoul National University, Republic of Korea. He investigates ways to certify and enforce safety of complex, unknown systems operating amidst other agents including humans.
-

Antonio Crivello
Antonio started his PhD at Princeton in Fall 2025 after earning his B.S. in Mechanical Engineering from Rice University. His research focuses on unsupervised reinforcement learning and representation learning to build safer agents and better-aligned AI assistants.
-

Nishanth Rao
Nishanth started his PhD at Princeton in Fall 2025. He is interested in Uncertainty Quantification and its applications to Safety and Robot Learning.
Visiting Students
-

Jan Tarrats
Jan is a final-year Mathematics and Computer Engineering visiting student from Universitat Politècnica de Catalunya (UPC), where he is part of the CFIS honors program. He is interested in ensuring robust safety guarantees for robotic systems.
Collaborators
-
Samuel Bateman
Sam is a Robot Learning PhD student advised by Professor Dhruv Shah in the PRISM Lab at Princeton University, supported by an NSF CISE Graduate Fellowship. He works primarily on reinforcement learning and diffusion models to improve scaling efficiency of robot learning. Before his PhD, he worked as a ML Research Engineer at Nuro.
-

Marjan Sharifi
Marjan is a cognitive scientist and interdisciplinary scholar who investigates how artistic practices and interactive technologies shape our cognitive processes and emotions.
Undergraduate Students
-
Bryan Boateng
Bryan ('26) is exploring safe robot learning by integrating foundational models with safety filters to enhance decision-making and task execution in uncertain environments, particularly focusing on legged robotics.
-
Rahul Kalavagunta
Rahul ('26) is exploring predictive motion planning and vision-based safety filters for agile drone platforms, both for autonomous flight and to aid in high speed human-controlled flight.
-
Elle Lazarski
Elle ('26) is exploring how AI co-pilots using reinforcement learning can augment human decision-making and performance in high-stakes environments.
-
Vasumathi Venkat
Vasu ('26) is exploring hardware-in-the-loop simulation and application of vision-based safety filters for autonomous underwater and aerial drone systems.
Alumni
-
Zixu Zhang
Zixu completed his PhD in Spring 2026. His research interests include mobile robot perception, state estimation, and interaction with the real world. He is currently a senior autopilot machine learning scientist at Tesla.
-
Haimin Hu
Haimin completed his PhD in Summer 2025. His research integrates dynamic game theory with control systems safety and machine learning to enable trustworthy human-centered robotic systems. He is currently an assistant professor of computer science at Johns Hopkins University.
-
Jarod Wille, M.Eng.
Jarod received his Master’s degree in Spring 2025 and joined Applied Intuition.
-
Bo (Percy) Peng
Bo investigated robots that constantly learn and adapt intelligently in Fall 2024 as a visiting student.
-
Gabriele Dragotto, Postdoctoral Fellow
Gabriele was a Data X and Postdoctoral Associate at Princeton from 2022 to 2024. He is now the CEO of ZERO, an AI startup transforming data to actionable decisions.
-
Kai-Chieh Hsu, Ph.D.
Kai-Chieh completed his PhD thesis in Spring 2024. His research combines machine learning techniques and game-theoretic reasoning to scale full-stack safety for learning-enabled robot autonomy. He is currently a machine learning research scientist at Nuro.
-
Isabella Racioppi, M.Eng.
Isabella received her Master's degree in Spring 2024.
-
Vikash Modi, M.Eng.
Vikash received his Master's degree in Spring 2024 and joined SpaceX.
-
Chiara von Gerlach
Chiara graduated from Princeton in Spring 2024 and started her Master's degree at Columbia University.
-
Etiosa Omeike
Etiosa graduated from Princeton in Spring 2024 and started his Ph.D. at Yale University. He received the GEM and NSF Graduate Fellowships.
-
Ladislav Töpfer
Ladislav graduated from Princeton in Spring 2024.
-
Promise Ekpo, M.S.
Promise received her Master’s degree in Spring 2023 and started her PhD at Cornell University.
-
Elie Svoll, M.Eng.
Elie received her Master's degree in Spring 2023 and joined a startup in the Bay Area as the AI tech lead.
-
Ameya Vaidya
Ameya graduated from Princeton in Spring 2024 and joined Bloomgberg as a software engineer.
-
Devon Wood-Thomas
Devon graduated from Princeton in Spring 2023 and joined the Max Planck Institute in Berlin as an AI safety researcher.
-
Ken Nakamura
Ken (co-advised by Prof. Naomi Leonard) graduated from Princeton in Spring 2023 and started his PhD at CMU Robotics Institute. He received the NSF Graduate Fellowship.
-
Kenar Vyas
Kenar graduated from Princeton in Spring 2023 and joined Tesla as an autonomy engineer.
-
Cedrick Argueta, M.S.
Cedrick received his Master's degree in Spring 2022 and joined The Aerospace Corporation.
-
Robert Shi, M.Eng.
Robert received his Master's degree in Spring 2022 and jointly co-founded the startup Vault Robotics.
-
Ritika Ramprasad
Ritika (co-advised by Prof. Naomi Leonard) graduated from Princeton in Spring 2022 and joined SpaceX as an avionics engineer.
-
Dennis Anthony, M.Eng.
Dennis received his Master's degree in Spring 2022 and received the GEM Fellowship. He joined Raytheon and subsequently started PhD at Georgia Tech.
-
Anoop Sonar
Anoop graduated from Princeton in Spring 2021 and, after year at RoboTire, started his PhD at MIT.
-
Jovana Kondic
Jovana graduated from Princeton in Spring 2021 and started her PhD at MIT.
Robots
-

Racing Simulator
Powered by Assetto Corsa, a high-fidelity racing simulator, and equipped with top-notch FANATEC wheelbase and pedals, our racing simulator lets visitors experience human-centered safety filtering in action. Everyone is welcome to hop in and give it a try!
-

Go2
Our Unitree Go2 has mastered the art of safety—staying robust under tugging, kicking, and even robot parkour! Now equipped with a modular AgileX Piper robotic arm, Go2 serves as a versatile platform for studying safe and agile mobile manipulation.
-

Digit
Digit is a bipedal robot made by Agility Robotics, with the ability to move around and physically interact with objects and people around it. Don’t be misled by its calm appearance, this robot packs some slick salsa moves.
-

Mini Truck
Mini Truck is “homemade” by the Safe Robotics Lab as part of the experiment hardware used in the ECE 346 course.
-

Spirit
Spirit is a quadrupedal robot designed by Ghost Robotics to walk robustly on a wide range of terrains. If you stop by our lab you may find it trotting around learning how to safely navigate new obstacle courses.